Functional Mock-up Interface - FMI¶
The Functional Mock-up Interface (FMI) Standard for model exchange and co-simulation allows export, exchange and import of pre-compiled models between different tools. The FMI standard is Modelica independent, so import and export works both between different Modelica or non-Modelica tools.
See also OMSimulator documentation.
FMI Standards¶
Version |
Support in OpenModelica |
|---|---|
Deprecated |
|
Supported |
|
Experimental |
Layered Standards¶
Layered standards extend FMI 3.0 with optional, separately versioned specifications.
Layered standard |
Support in OpenModelica |
|---|---|
Not planned |
|
Not planned |
|
Planned |
|
Planned |
|
Planned (demonstrator in progress) |
Supported Capability Flags¶
The optional capabilities advertised in the modelDescription.xml of an
exported FMU, per FMI version and interface type (Model Exchange, Co-Simulation
and, for FMI 3.0, Scheduled Execution).
Capability |
2.0 ME |
2.0 CS |
3.0 ME |
3.0 CS |
3.0 SE |
|---|---|---|---|---|---|
Get and set FMU state |
yes |
yes |
yes |
yes |
yes |
Serialize FMU state |
no |
no |
yes |
yes |
yes |
Directional derivatives |
cond |
exp |
cond |
cond |
cond |
Adjoint derivatives |
— |
— |
wip |
wip |
wip |
Per-element dependencies |
— |
— |
no |
no |
no |
Variable communication step size |
— |
yes |
— |
yes |
— |
Interpolate inputs |
— |
yes |
— |
— |
— |
Max output derivative order |
— |
1 |
— |
1 |
— |
Event mode |
— |
— |
— |
yes |
— |
Intermediate update |
— |
— |
— |
no |
— |
Legend:
yes/no— the capability flag is exported astrue/false.cond— exported astrueonly when a symbolic directional-derivative Jacobian is available, i.e. not disabled via -d=disableDirectionalDerivatives.exp— only enabled with the experimental flag-d=fmuExperimental(falseby default). In FMI 3.0 these state features are always enabled.wip— in active development; currently exported asfalse.—— not applicable to this interface type or FMI version.
FMI Export¶
To export a FMU use the OpenModelica command buildModelFMU() from the command line interface, OMShell, OMNotebook or MDT. The FMU export command is also integrated in OMEdit. Select File > Export > FMU. Or alternatively, right click a model to obtain the export command. The FMU package is generated in the current working directory of OMC or the directory set in OMEdit > Options > FMI > Move FMU. You can use the cd() command to see the current location. The location of the generated FMU is printed in the Messages Browser of OMEdit or on the command line.
You can set which version of FMI to export through OMEdit settings, see section FMI Options.
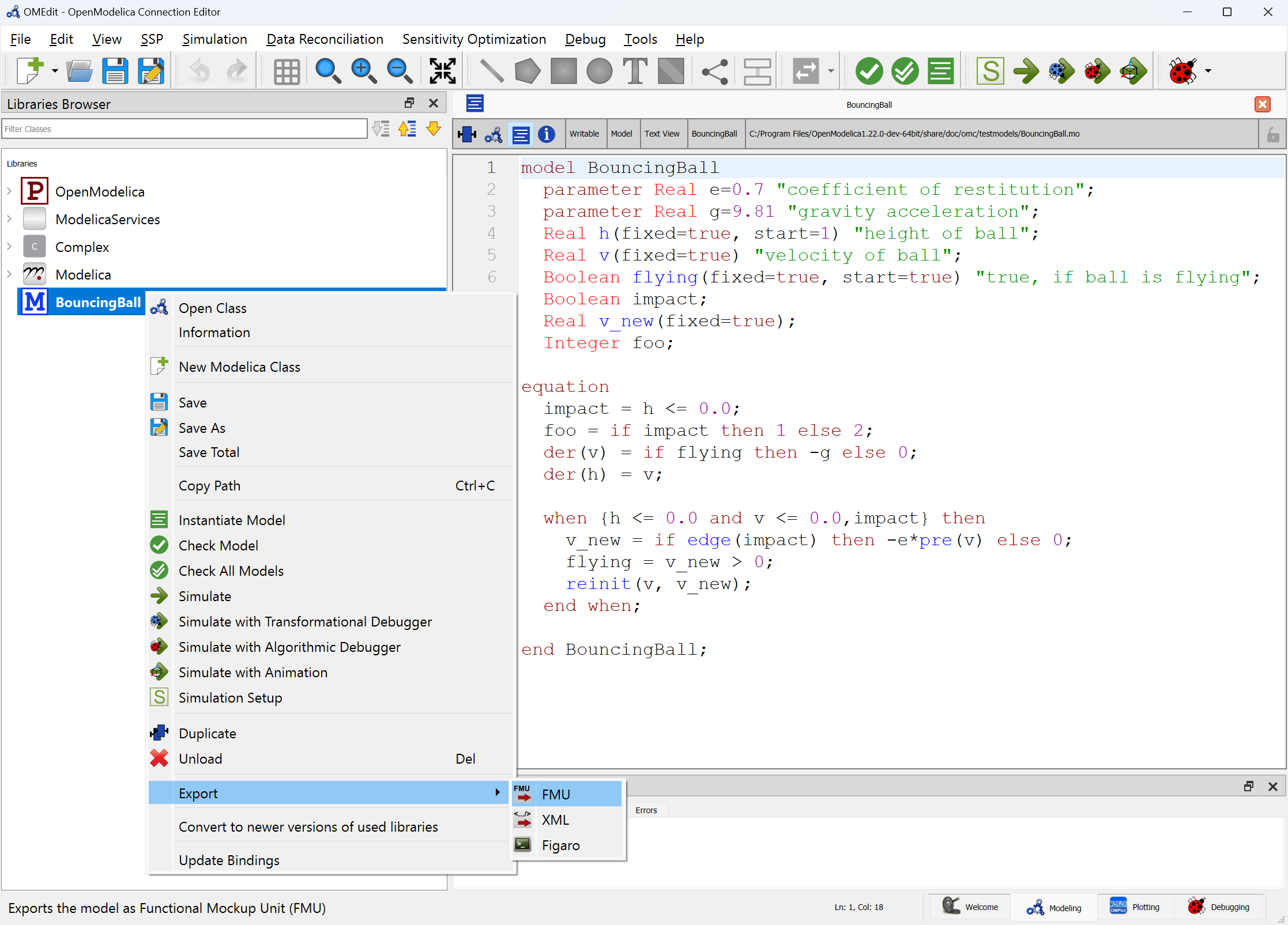
Figure 42 FMI Export.¶
To export the bouncing ball example to an FMU, use the following commands:
>>> loadFile(getInstallationDirectoryPath() + "/share/doc/omc/testmodels/BouncingBall.mo")
true
>>> buildModelFMU(BouncingBall)
"«DOCHOME»/BouncingBall.fmu"
Note
Notification: Model statistics after passing the front-end and creating the data structures used by the back-end:
* Number of equations: 6
* Number of variables: 6
Notification: Model statistics after passing the back-end for initialization:
* Number of independent subsystems: 3
* Number of states: 0 ()
* Number of discrete variables: 9 (v_new,$PRE.v_new,flying,$PRE.flying,impact,foo,$whenCondition1,$whenCondition2,$whenCondition3)
* Number of discrete states: 0 ()
* Number of clocked states: 0 ()
* Top-level inputs: 0
Notification: Strong component statistics for initialization (13):
* Single equations (assignments): 13
* Array equations: 0
* Algorithm blocks: 0
* Record equations: 0
* When equations: 0
* If-equations: 0
* Equation systems (not torn): 0
* Torn equation systems: 0
* Mixed (continuous/discrete) equation systems: 0
Notification: Model statistics after passing the back-end for simulation:
* Number of independent subsystems: 1
* Number of states: 2 (v,h)
* Number of discrete variables: 7 ($whenCondition3,$whenCondition2,$whenCondition1,foo,v_new,impact,flying)
* Number of discrete states: 2 (impact,v)
* Number of clocked states: 0 ()
* Top-level inputs: 0
Notification: Strong component statistics for simulation (9):
* Single equations (assignments): 7
* Array equations: 0
* Algorithm blocks: 0
* Record equations: 0
* When equations: 2
* If-equations: 0
* Equation systems (not torn): 0
* Torn equation systems: 0
* Mixed (continuous/discrete) equation systems: 0
After the command execution is complete you will see that a file BouncingBall.fmu has been created. Its contents varies depending on the target platform. On the machine generating this documentation the contents in Listing 2 are generated (along with the C source code).
binaries/
binaries/linux64/
binaries/linux64/BouncingBall.so
modelDescription.xml
A log file for FMU creation is also generated named ModelName_FMU.log. If there are some errors while creating the FMU, they will be shown in the command line window and logged in this log file as well.
By default an FMU that can be used for both Model Exchange and Co-Simulation is generated. We support FMI 1.0 (deprecated) and FMI 2.0 for Model Exchange and Co-Simulation FMUs, with experimental support for FMI 3.0 (see the version table above).
For the Co-Simulation FMU two integrator methods are available:
Forward Euler [default]
SUNDIALS CVODE (see [1])
Forward Euler uses root finding, which does an Euler step of communicationStepSize
in fmi2DoStep. Events are checked for before and after the call to
fmi2GetDerivatives.
If CVODE is chosen as integrator the FMU should also include runtime dependencies (--fmuRuntimeDepends=modelica) to copy all used dynamic libraries into the generated FMU to make it exchangeable.
To export a Co-Simulation FMU with CVODE for the bouncing ball example use the following commands:
>>> loadFile(getInstallationDirectoryPath() + "/share/doc/omc/testmodels/BouncingBall.mo")
true
>>> setCommandLineOptions("--fmiFlags=s:cvode")
true
>>> buildModelFMU(BouncingBall, version = "2.0", fmuType="cs")
"«DOCHOME»/BouncingBall.fmu"
Note
Notification: Model statistics after passing the front-end and creating the data structures used by the back-end:
* Number of equations: 6
* Number of variables: 6
Notification: Model statistics after passing the back-end for initialization:
* Number of independent subsystems: 3
* Number of states: 0 ()
* Number of discrete variables: 9 (v_new,$PRE.v_new,flying,$PRE.flying,impact,foo,$whenCondition1,$whenCondition2,$whenCondition3)
* Number of discrete states: 0 ()
* Number of clocked states: 0 ()
* Top-level inputs: 0
Notification: Strong component statistics for initialization (13):
* Single equations (assignments): 13
* Array equations: 0
* Algorithm blocks: 0
* Record equations: 0
* When equations: 0
* If-equations: 0
* Equation systems (not torn): 0
* Torn equation systems: 0
* Mixed (continuous/discrete) equation systems: 0
Notification: Model statistics after passing the back-end for simulation:
* Number of independent subsystems: 1
* Number of states: 2 (v,h)
* Number of discrete variables: 7 ($whenCondition3,$whenCondition2,$whenCondition1,foo,v_new,impact,flying)
* Number of discrete states: 2 (impact,v)
* Number of clocked states: 0 ()
* Top-level inputs: 0
Notification: Strong component statistics for simulation (9):
* Single equations (assignments): 7
* Array equations: 0
* Algorithm blocks: 0
* Record equations: 0
* When equations: 2
* If-equations: 0
* Equation systems (not torn): 0
* Torn equation systems: 0
* Mixed (continuous/discrete) equation systems: 0
The FMU BouncingBall.fmu will have a new file BouncingBall_flags.json in its resources directory. By manually changing its content users can change the solver method without recompiling the FMU.
The BouncingBall_flags.json for this example is displayed in Listing 3.
{
"s" : "cvode"
}
Compilation Process¶
OpenModelica can export FMUs that are compiled with CMake (default) or Makefiles. CMake version v3.21 or newer is recommended, minimum CMake version is v3.5.
The Makefile FMU export will be removed in a future version of OpenModelica. Set compiler flag --fmuCMakeBuild=false to use the Makefiles export.
The FMU contains a CMakeLists.txt file in the sources directory that can be used to re-compile the FMU for a different host and is also used to cross-compile for different platforms.
The CMake compilation accepts the following settings:
BUILD_SHARED_LIBS: Boolean value to switch between dynamic and statically linked binaries.ON(default): Compile DLL/Shared Object binary object.OFF: Compile static binary object.
FMI_INTERFACE_HEADER_FILES_DIRECTORY: String value specifying path to FMI header files containingfmi2Functions.h,fmi2FunctionTypes.handfmi2TypesPlatforms.h.Defaults to a location inside the OpenModelica installation directory, which was used to create the FMU. They need to be version 2.0.4 from the FMI Standard.
RUNTIME_DEPENDENCIES_LEVEL: String value to specify runtime dependencies set.none: Adds no runtime dependencies to FMU. The FMU can't be used on a system if it doesn't provided all needed dependencies.modelica(default): Add Modelica runtime dependencies to FMU, e.g. a external C library used from a Modelica function. Needs CMake version v3.21 or newer.all: Add system and Modelica runtime dependencies. Needs CMake version v3.21 or newer.
NEED_CVODE: Boolean value to integrate CVODE integrator into CoSimulation FMU.ON: Link to SUNDIALS CVODE. If CVODE is not in a default locationCVODE_DIRECTORYneeds to be set. Its also recommended to useRUNTIME_DEPENDENCIES_LEVEL=modelicaor higher to add SUNDIALS runtime dependencies into the FMU.OFF(default): Don't link to SUNDIALS CVODE.
CVODE_DIRECTORY: String value with location of librariessundials_cvodeandsundials_nvecserialwith SUNDIALS version 5.4.0.Defaults to a location inside the OpenModelica installation directory, which was used to create the FMU.
Then use CMake to configure, build and install the FMU.
To repack the FMU after installation use custom target create_fmu.
For example to re-compile the FMU with cmake and runtime dependencies use:
$ unzip BouncingBall.fmu -d BouncingBall_FMU
$ cd BouncingBall_FMU/sources
$ cmake -S . -B build_cmake \
-D RUNTIME_DEPENDENCIES_LEVEL=modelica \
-D CMAKE_C_COMPILER=clang -D CMAKE_CXX_COMPILER=clang++
$ cmake --build build_cmake --target create_fmu --parallel
Platforms¶
The platforms setting specifies for what target system the FMU is compiled:
Empty: Create a Source-Code-only FMU.
native: Create a FMU compiled for the exporting system.<cpu>-<vendor>-<os>host triple: OpenModelica searches for programs in PATH matching pattern<cpu>-<vendor>-<os>ccto compile. E.g.x86_64-linux-gnufor a 64 bit Linux OS ori686-w64-mingw32for a 32 bit Windows OS using MINGW.<cpu>-<vendor>-<os> docker run <image>Host triple with Docker image: OpenModelica will use the specified Docker image to cross-compile for given host triple. Because privilege escalation is very easy to achieve with Docker OMEdit adds--pull=neverto the Docker calls for themultiarch/crossbuildimages. Only use this option if you understand the security risks associated with Docker images from unknown sources. E.g.x86_64-linux-gnu docker run --pull=never multiarch/crossbuildto cross-compile for a 64 bit Linux OS. Because system libraries can be different for different versions of the same operating system, it is advised to use --fmuRuntimeDepends=all.
FMI Import - SSP¶
If you want to simulate a single, stand-alone FMU, or possibly a connection of several FMUs, the recommended tool to do that is OMSimulator, see the OMSimulator documentation and Graphical Modelling for further information.
FMI Import - Non-Standard Modelica Model¶
FMI Import allows to use an FMU, generated according to the FMI for Model Exchange 2.0 standard, as a component in a Modelica model. This can be useful if the FMU describes the behavior of a component or sub-system in a structured Modelica model, which is not easily turned into a pure FMI-based model that can be handled by OMSimulator.
FMI is a computational description of a dynamic model, while a Modelica model is a declarative description; this means that not all conceivable FMUs can be successfully imported as Modelica models. Also, the current implementation of FMU import in OpenModelica is still somewhat experimental and not guaranteed to work in all cases. However, if the FMU-ME you want to import was exported from a Modelica model and only represents continuous time dynamic behavior, it should work without problems when imported as a Modelica block.
Please also note that the current implementation of FMI Import in OpenModelica is based on a built-in wrapper that uses a reinit() statement in an algorithm section. This is not allowed by the Modelica Language Specification, so it is necessary to set the compiler to accept this non-standard construct by setting the --allowNonStandardModelica=reinitInAlgorithms compiler flag. In OMEdit, you can set this option by activating the Enable FMU Import checkbox in the Tools | Options | Simulation | Translation Flags tab. This will generate a warning during compilation, as there is no guarantee that the imported model using this feature can be ported to other Modelica tools; if you want to use a model that contains imported FMUs in another Modelica tool, you should rely on the other tool's import feature to generate the Modelica blocks corresponding to the FMUs.
After setting the --allowNonStandardModelica flag, to import the FMU package use the OpenModelica command importFMU,
>>> list(OpenModelica.Scripting.importFMU, interfaceOnly=true);
The command could be used from command line interface, OMShell, OMNotebook or MDT. The importFMU command is also integrated with OMEdit through the File > Import > FMU dialog: the FMU package is extracted in the directory specified by workdir, or in the current directory of omc if not specified, see Tools > Open Working Directory.
The imported FMU is then loaded in the Libraries Browser and can be used as any other regular Modelica block.
Footnotes
